Capteur photographique
(Bien que succinct, ce chapitre est là pour comprendre les réglages d'un APN, les logiciels de capture et de traitement du signal )
Le capteur est l'élément fondamental des appareils numériques.
Il est constitué d'une matrice d'éléments photosensibles ( pixel) intégrés sur une tranche de semi-conducteur. Chaque photosite ( jonction PN) est un élément sensible à la lumière qui va produire un signal électrique analogique proportionnel à la quantité de photons reçus.
Technologie CCD

Les premiers capteurs (1969) étaient de technologie CCD ( Charged Coupled Device)
Le principe du fonctionnement est donné de façon imagée par le schéma ci-contre.
Un photosite est représenté sous la forme d'un seau qui reçoit des gouttes d'eau ( les photons)
Les seaux sont rangés en ligne et en colonne pour former une matrice sur un tapis roulant (sensor matrix) .
La quantité d'eau dans chaque seau reflète alors la densité locale des gouttes.
Après un temps d'exposition donné, on va lire la quantité d'eau retenue dans chaque seau.
Mode de lecture:
- on va déverser le contenu d'une rangée de seaux dans une autre ligne de seaux placés sur un petit tapis roulant (horizontal register).
- on va déverser successivement ( en faisant avancer ce petit tapis roulant d'un cran) le contenu des seaux dans un pluviomètre (output node) pour en mesurer la hauteur.
- le grand tapis roulant avance d'une rangée et on retourne en 1 ( pour lire toutes les lignes)
Les hauteurs lues dans le pluviomètre ( grandeur analogique) sont converties en numérique N ( sur 8 ,12 ou 16 bits) .
Le nombre de décalages de colonne (x) et de ligne (y) sont les coordonnées du seau mesuré.
Les valeurs N sont mémorisées en série dans un fichier en tenant compte de leurs positions (x,y) .
Technologie CMOS

Elle a été développée en 1990
On retrouve le même principe, mais chaque photosite est un pluviomètre calibré qui donne directement la hauteur.
Il n'y a plus de tapis roulant, mais un dispositif de multiplexage qui vient lire successivement la hauteur sur chaque pluviomètre. Cette hauteur (analogique) est convertie en numérique N ( 8 ,12 ou 16 bits) .
Une partie de la surface de la puce est occupée par le dispositif de multiplexage de lecture et d'amplification. La surface de la photodiode est donc plus petite que dans la technologie CCD et donc moins sensible en basse lumière.
Comparaison CCD / CMOS

Les caméras professionnelles N&B avec grand capteur refroidi sont en technologie CCD mais hors de prix.
Avec le développement des APN, des smartphones, des caméras pour la surveillance et l'industrie, des caméras embarquées sur les automobiles... c'est la technologie CMOS qui est utilisée.
Les énormes avancées technologiques font que les sensibilités des CMOS sont voisines de celles des CCD.
De plus, ces capteurs ont une consommation électrique réduite et des vitesses de lecture plus rapides.
Actuellement, la technologie CMOS domine largement le marché et propose des capteurs performants à des prix 'abordables'.
La photographie numérique en couleur
En astrophotographie, il y a deux méthodes pour réaliser des photos en couleurs:
- avec un capteur monochrome +filtres
- avec un capteur couleur
Avec capteur monochrome
Les photosites donnent une information sur le flux de photons incidents, c'est un signal de luminance
En interposant des filtres de bande passante F devant le capteur, l'image obtenue est la luminance pour les fréquences F.
Pour restituer la couleur, il faut donc successivement faire 3 poses;
Une avec un filtre qui ne laisse passer que le rouge => composante ROUGE
La suivante avec un filtre qui ne laisse passer que le vert => composante VERT
La dernière avec un filtre qui ne laisse passer que le bleu => composante BLEU
L'image finale est reconstituée en réunissant par un logiciel les 3 composantes.
Technique: On place devant la caméra à une roue à filtres ( manuelle ou motorisée) qui permet de changer de filtre sans perturber les réglages de l'appareil de prise de vue.


Le nombre de composantes n'est pas limité, avec 4 images de luminance prise avec 4 filtres L R V B, l'image colorée est restituée en quadrichromie .
On a aussi la possibilité d'utiliser des filtres spécifiques : lunaire, planète, nébuleuse ( large bande, H alpha, H beta, OIII,UHC …) pour améliorer les contrastes, favoriser certaines longueurs d'onde, mais là, le budget va vite augmenter !
Avec capteur couleur

On retrouve la même structure matricielle
Chaque photosite est muni d'une micro-lentille colorée qui ne laisse passer que les photons de longueur d'onde comprise dans sa 'bande passante' et les focalise sur sa zone sensible . C'est le filtre de Bayer.
Pour s'adapter à la courbe de réponse de notre œil qui est très sensible dans le vert, le nombre de photosites verts est 2 fois plus élevé que le bleu et le rouge.
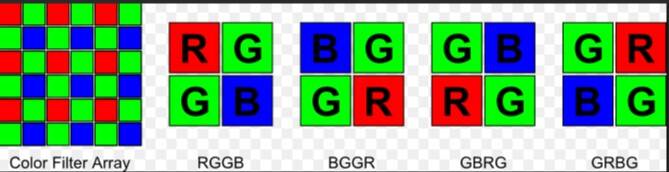
Le fichier correspondant à la lecture d'une image est une suite de trames (Matrice de Bayer) qui selon le type de capteur est RGGB, ou BGGR ou GBRG ou GRBG.
Les fichiers de sortie directe du capteur sont mémorisés avec l' extension .raw pour Canon et .nef pour Nikon et sont appelés des « brutes ».
Pour les caméras le film a pour extension .ser . Ces fichiers ne sont pas lisibles comme des images avec les logiciels classiques.
Un APN ou une caméra donne également des fichiers 'débayérisés' c'est à dire codés en RVB et comprimés sous l'extension .jpg ou .avi .
Le choix du format de sortie est sélectionné dans le menu de configuration de l'appareil.
En astrophotographie, où le traitement des images est essentiel , ce sont des logiciels dédiés qui vont transformer les brutes en images affichables.
Il est donc essentiel de sélectionner les formats de sortie .raw ou .nef ou .ser.
Prétraitement des fichiers 'brutes'
Les capteurs sont des circuits intégrés qui concentrent de millions de fonctions sur la puce de semi-conducteur.
Le signal de sortie comporte inévitablement un bruit de fond 'électronique'( comme en acoustique)
Il y a 3 sources de signaux ' parasites' qui viennent dégrader les images données pas un capteur.
1) Les semiconducteurs sont sensibles à la température. Plus la température va s'élever plus les courants parasites seront importants ( les caméras performantes sont refroidies par des dispositifs à effet Peltier). Certains pixels défaillants vont donner des points colorés ( pixels chauds )
2) Les photosites ont une taille de quelques microns. Tous les courants qui circulent induisent dans les circuits voisins sur la puce, des bruits de lecture.
3) A l' échelle du micron, la moindre poussière sur le capteur va localement se traduire par des taches sur l'image.
Même si on fait très attention , comme on va utiliser les appareils sans objectif le capteur est à 'nu' , il y aura toujours des micro-poussières qui se déposeront dessus.
Heureusement dans un premier temps, on peut minimiser ces défauts ou s'en accommoder, en choisissant correctement des plages de réglage pour que l'image finale soit convenable . On prend plaisir à pointer sur un objet du ciel et la photo est avant tout un trophée.
Alors souvent on se passera des prétraitements et on se fera plaisir avec de belles photos du ciel profond . ( pour être plus belles , il faudrait beaucoup beaucoup plus de temps )
En astrophotographie, on ne fait pas une seule prise de vue car les turbulences dégradent énormément les images. Il faut en faire le plus possible et faire un traitement des images avec des logiciels spécialisés (IRIS , AstroSurface,... )
Les détails , noyés dans le bruit sur une unique photo, vont apparaitre lors l'empilement de nombreuses photos.
Si on recherche plus de qualité dans les images, il faut faire des prises de vues complémentaires pour corriger les 'brutes' ce sont les DOF.
B Brutes images ( T,G, θ) fichiers image de l'objet pointé
L'imageur est sur le télescope, la mise au point est effectuée, les paramètres de réglage sont: la durée d'exposition Tp et le gain G ( ISO sur les APN) .
Le paramètre température θ est aussi important mais on ne le contrôle pas (sauf le capteur est refroidi).
D Darks noir ( Tp,G, θ) fichiers de compensation des bruits thermiques et pixels 'chauds' du capteur
Méthode : prendre une série d'images avec le cache sur le télescope dans les mêmes conditions ( Tp,G, θ) que les brutes
(Les darks sont à faire à chaque session d’observation. Le logiciel Siril en fera un masterDark )
O Offsets (ou Bias) noir( T=1/4000, x,x) compensation des bruits de lecture
Méthode : Régler le temps d'exposition sur le plus court (ex 1/4000) et faire une série de photo.
Le logiciel en fera un masterOffset. A faire une fois car il est lié à l'appareil et ne dépend pas des conditions de prise de vue.
F Flats blanc( x,x,x) éliminer les traces de poussières et le vignetage ( assombrissement dans les coins) .
Méthode : diriger le télescope sur un zone blanche uniformément éclairée, ou tissu blanc sur le télescope ou le ciel , dans les mêmes conditions de mise au point que lors des 'brutes'.
Ajuster le temps de pose pour ne pas saturer ( 60%). Comme les temps de poses sont courts , la température n'a pas d'influence.
Les flats sont à faire régulièrement à cause du dépôts de poussières qui évolue. Le logiciel en fera un masterFlats
Dans le cas idéal, l'image serait uniforme tous les pixels sont à 1 . Les poussières et les coins de l'image sont plus sombres (<1) . Ces défauts sont effacés artificiellement en augmentant le gain localement pour le ramener à 1
Avec ces 3 fichiers, on va effectuer un prétraitement des brutes pour obtenir la série de clichés corrigées.
Ces fichiers serviront de base pour le traitement d'image , alignement, empilement , correction par ondelettes, pour obtenir la photo finale.
La formule de correction est Cliché corrigé = (bruts-darks ) / (flats-offset) heureusement des 'scripts' vont automatiser tout ces traitements.
Créez votre propre site internet avec Webador